
 I am glad to post that Miguel Aguilera presented his PhD thesis and is now officially a doctor in cognitive science by the University of Zaragoza. His thesis «Interaction Dynamics and Autonomy in Cognitive Systems» is a rare, challenging, broad, audacious and brilliant contribution to the study of autonomous systems. How does a «self» or an «autonomous system» emerge and constitute itself through interactions with the environment? It seems the answer is impossible to provide, you need to have a self, an identity, before it starts interacting with the environment, but, at the same time, some forms of sensorimotor or cognitive identity emerge and sustain themselves through interactions. You are an example yourself: your identity is the result of your actions, and your actions are caused by you. How could this be? Can we formalize and model this type of emergence of autonomous organizations through interactions? This is the fundamental question addressed by Dr. Aguilera. And the results are innovative, profound, operational and insightful. The core of the thesis is a robotic model capable to switch spontaneously between different behavioural preferences, and whose control architecture is itself a novel contribution to robotics: a kuramoto oscillatory network whose connections plastically change so as to keep macroscopic relationships homeostatic. The robot is a system that is capable to maintain its own behavioural organization while shifting preferences. Nothing is hard-coded, the controller is designed using a carefully scaffolded evolutionary optimization algorithm that gave rise to a complex dynamical system that shows macroscopic properties that emerge from distributed interactive processes at different timescales.
I am glad to post that Miguel Aguilera presented his PhD thesis and is now officially a doctor in cognitive science by the University of Zaragoza. His thesis «Interaction Dynamics and Autonomy in Cognitive Systems» is a rare, challenging, broad, audacious and brilliant contribution to the study of autonomous systems. How does a «self» or an «autonomous system» emerge and constitute itself through interactions with the environment? It seems the answer is impossible to provide, you need to have a self, an identity, before it starts interacting with the environment, but, at the same time, some forms of sensorimotor or cognitive identity emerge and sustain themselves through interactions. You are an example yourself: your identity is the result of your actions, and your actions are caused by you. How could this be? Can we formalize and model this type of emergence of autonomous organizations through interactions? This is the fundamental question addressed by Dr. Aguilera. And the results are innovative, profound, operational and insightful. The core of the thesis is a robotic model capable to switch spontaneously between different behavioural preferences, and whose control architecture is itself a novel contribution to robotics: a kuramoto oscillatory network whose connections plastically change so as to keep macroscopic relationships homeostatic. The robot is a system that is capable to maintain its own behavioural organization while shifting preferences. Nothing is hard-coded, the controller is designed using a carefully scaffolded evolutionary optimization algorithm that gave rise to a complex dynamical system that shows macroscopic properties that emerge from distributed interactive processes at different timescales.
But this is not the major contribution of the thesis.
Dr. Aguilera has innovated on the use of different statistical and experimental methods to measure and quantify the extent to which the robot is an agent, a genuine source of action causation, while in continuous feedback with the environment. The result is an insightful conception of what makes us agents: a large scale (compared to the timescale of the interaction itself) plastic modulation of the coupling with the environment. When you are absorbed in a task that involves continuous reciprocal interaction with the environment (surfing, dancing, playing) what makes you an agent is not the current sensorimotor flow, where the dynamic reciprocity does not always help distinguishing the causal contribution of agent and that of the environment, but your capacity to modulate the coupling. His thesis provides a set of measuring, modelling and experimental tools to scientifically characterize these forms of autonomy in interaction. Of particular novelty and promising future impact is the combination of information theoretic measures for complexity and fractal analysis for self-organized criticality.
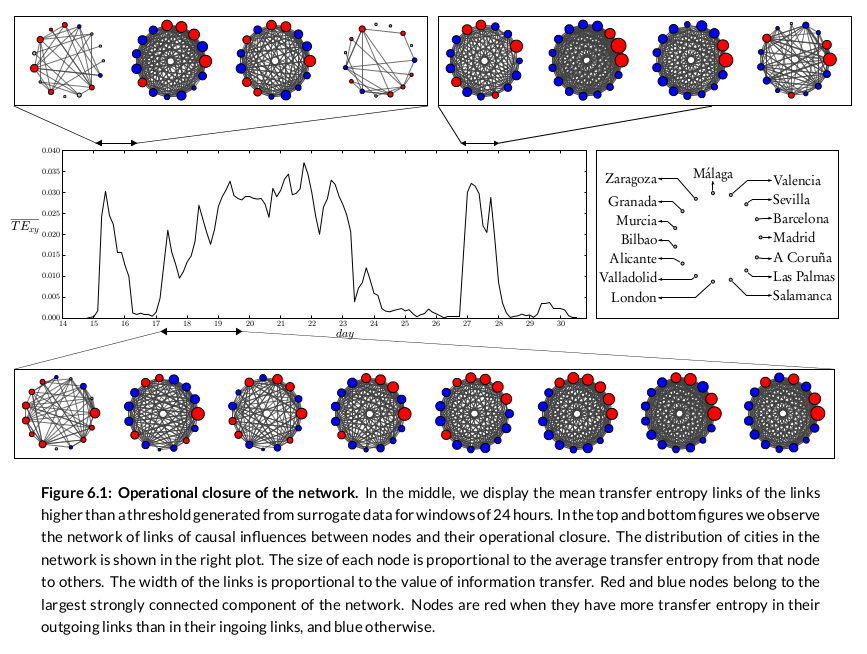 Interestingly these tools and methods find applications beyond the case of a single robot, and Miguel Aguilera has shown an excellent extension of his philosophical and methodological contributions to social sciences and, particularly, to politics and social network analysis. How could robotics help in these fields? It turns out that the formation of collective identities and autonomous organizations has mostly been studied in terms of the content of the discourse or in terms of the organizational structure of a collective (central committees, etc.). But, and these is particularly relevant for the 15M and similar distributed and diffuse multitudinous organizations, one can also approach the question of collective identity formation through the analysis of the interactions that different individual sustain with each other over time and space. How can we measure these? Can we identify the “democratic” (non-centralized, participatory, coherent yet diverse) quality of a social process? The answer to these questions is provided in chapters 5 and 6. Pink noise multifractal analysis, sychronization analysis between different cities, complexity idexes provide good measurement tools to characterize social autonomy in communication networks.
Interestingly these tools and methods find applications beyond the case of a single robot, and Miguel Aguilera has shown an excellent extension of his philosophical and methodological contributions to social sciences and, particularly, to politics and social network analysis. How could robotics help in these fields? It turns out that the formation of collective identities and autonomous organizations has mostly been studied in terms of the content of the discourse or in terms of the organizational structure of a collective (central committees, etc.). But, and these is particularly relevant for the 15M and similar distributed and diffuse multitudinous organizations, one can also approach the question of collective identity formation through the analysis of the interactions that different individual sustain with each other over time and space. How can we measure these? Can we identify the “democratic” (non-centralized, participatory, coherent yet diverse) quality of a social process? The answer to these questions is provided in chapters 5 and 6. Pink noise multifractal analysis, sychronization analysis between different cities, complexity idexes provide good measurement tools to characterize social autonomy in communication networks.
This is a PhD thesis to be mined in detail. Not everybody will be able to squeeze and fully understand and appreciate it. But those who can will certainly keep this thesis at hand, as a Swiss army knife of analylitic and modelling techniques that help measure (and even engineer!) one of the most important, intriguing and elusive properties of life, mind and society: autonomy.
